
CAN, czyli magistrala CAN, pozostaje jednym z najpraktyczniejszych sposobów komunikacji między sterownikami w samochodach i maszynach przemysłowych. W tym tekście pokazuję, jak działa ta sieć, czym różni się klasyczny CAN od CAN FD, gdzie spotkasz ją w realnych systemach oraz jak diagnozować typowe problemy bez zgadywania. To ważny temat, bo w takich instalacjach stabilność komunikacji często decyduje o tym, czy cały układ działa przewidywalnie.
Najważniejsze rzeczy o CAN w praktyce
- CAN nie adresuje urządzeń bezpośrednio, tylko rozsyła ramki z identyfikatorami, a priorytet wiadomości rozstrzyga arbitraż.
- Klasyczny CAN zwykle pracuje do 1 Mbit/s i przenosi do 8 bajtów danych, a CAN FD zwiększa ładunek do 64 bajtów i przyspiesza transmisję danych do 5 Mbit/s.
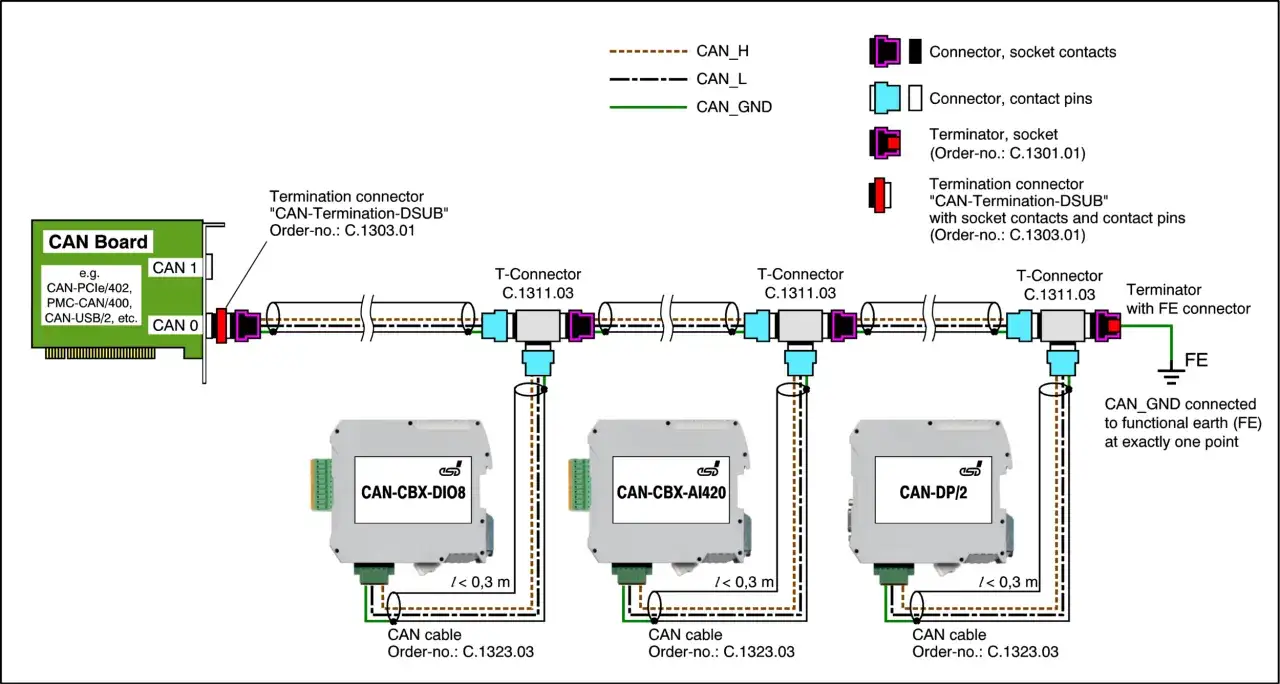
- Dwie terminacje 120 Ω na końcach magistrali to nie detal, tylko warunek stabilnej pracy.
- W motoryzacji CAN obsługuje wiele podsystemów auta, a w przemyśle sprawdza się tam, gdzie liczą się odporność na zakłócenia, prostota i deterministyczna wymiana danych.
- CANopen i J1939 to warstwy wyższe, które porządkują sposób użycia CAN w konkretnych branżach.
Czym jest CAN i dlaczego wciąż ma znaczenie
CAN to dwuprzewodowy, różnicowy system komunikacji szeregowej zaprojektowany do pracy w trudnym środowisku elektrycznym. Z mojego punktu widzenia jego największa zaleta nie polega na spektakularnej przepustowości, tylko na tym, że potrafi działać przewidywalnie tam, gdzie zakłócenia, wibracje i rozbudowana wiązka przewodów są codziennością.
W praktyce CAN sprawdza się jako sieć sterująca: łączy wiele węzłów, pozwala im nadawać bez centralnego „dyktatora” i ogranicza liczbę przewodów. Dlatego przez lata utrzymał pozycję w samochodach, pojazdach specjalnych, maszynach mobilnych i automatyce, mimo że obok niego coraz częściej pracuje Ethernet. CAN nie wygra więc tam, gdzie trzeba przesyłać duże strumienie danych, ale bardzo często wygrywa tam, gdzie liczy się odporność i prostota integracji.
Najważniejsze jest tu rozróżnienie: sam CAN to nie kompletna aplikacja, tylko fundament komunikacji. Na tym fundamencie buduje się później konkretne profile i zasady wymiany danych, dlatego dalej przechodzę do tego, jak ta transmisja działa od strony technicznej.
Jak działa komunikacja na tej magistrali
Dwie żyły i sygnał różnicowy
Na fizycznym poziomie CAN używa dwóch przewodów, zwykle oznaczanych jako CAN_H i CAN_L. Urządzenia nie „słuchają” pojedynczego napięcia, tylko różnicy między tymi liniami, co znacząco poprawia odporność na zakłócenia elektromagnetyczne. W kablach spotyka się skrętkę, bo pomaga ona ograniczyć wpływ szumów i odbić sygnału.
Na końcach magistrali montuje się terminację 120 Ω. To jeden z tych elementów, które początkujący często bagatelizują, a potem tracą godziny na szukanie błędu. Przy wyłączonym zasilaniu dobrze zaprojektowana sieć zwykle pokaże około 60 Ω mierzonych między CAN_H i CAN_L, bo dwie rezystancje 120 Ω pracują równolegle.
Arbitraż bez klasycznej kolizji
CAN działa w modelu multi-master, więc każdy węzeł może próbować nadawać, gdy magistrala jest wolna. O tym, kto faktycznie uzyska dostęp do medium, decyduje arbitraż bitowy. W skrócie: bity dominujące „wygrywają” z recesywnymi, a wiadomość z niższym identyfikatorem ma wyższy priorytet. Dzięki temu nie ma brutalnej kolizji, tylko eleganckie ustępowanie niższego priorytetu.
To rozwiązanie ma duże znaczenie w systemach sterowania. Jeśli np. komunikat związany z bezpieczeństwem albo napędem ma niższy identyfikator, zostanie wysłany szybciej niż mniej pilne dane komfortowe. Właśnie dlatego porządek identyfikatorów w projekcie nie jest kosmetyką, tylko elementem architektury czasu rzeczywistego.
Przeczytaj również: Zegarek Apple Watch Ultra – wytrzymałość i funkcje dla aktywnych
Ramki, identyfikatory i bit stuffing
W CAN nie wysyła się „do konkretnego adresata” w taki sposób, jak w sieci komputerowej. Węzły otrzymują ramki rozgłoszeniowo, a odbiorcy sami decydują, czy dana wiadomość ich interesuje. Identyfikator ramki pełni jednocześnie rolę priorytetu i znacznika znaczenia danych. W praktyce spotkasz identyfikatory 11-bitowe oraz rozszerzone 29-bitowe.
W transmisji działa też bit stuffing, czyli mechanizm wstawiania dodatkowego bitu po dłuższej serii identycznych bitów, żeby utrzymać synchronizację. To brzmi technicznie, ale efekt jest prosty: magistrala pozostaje stabilna nawet wtedy, gdy dane zawierają dłuższe powtarzalne sekwencje. Gdy ten mechanizm i arbitraż zaczynają mieć sens, łatwiej zrozumieć, czym różni się sam CAN od profili działających ponad nim.
Klasyczny CAN, CAN FD i warstwy wyższe
Według Microchip klasyczny CAN zwykle pracuje do 1 Mbit/s i przenosi do 8 bajtów danych w ramce, natomiast CAN FD zwiększa ładunek do 64 bajtów i pozwala przyspieszyć fazę danych do 5 Mbit/s. To praktyczna różnica, bo przy większej liczbie sygnałów CAN FD zmniejsza liczbę ramek potrzebnych do przesłania tych samych informacji.
| Wariant | Co wnosi | Typowe zastosowanie | Ważne ograniczenie |
|---|---|---|---|
| Classical CAN | Sprawdzona, prosta i bardzo odporna transmisja | ECU w autach, body electronics, proste maszyny | Do 8 bajtów danych w ramce i niższa przepustowość |
| CAN FD | Większy ładunek danych i wyższa prędkość w fazie danych | Nowe platformy pojazdów, diagnostyka, bardziej rozbudowane sterowniki | Wymaga zgodnych kontrolerów i transceiverów |
| CANopen | Ujednolicone obiekty komunikacyjne i zarządzanie siecią | Automatyka maszyn, urządzenia przemysłowe, urządzenia mobilne | To profil wyższego poziomu, a nie osobna warstwa fizyczna |
| J1939 | Struktura komunikacji dla pojazdów ciężkich i maszyn terenowych | Ciężarówki, rolnictwo, budownictwo, sprzęt off-highway | Wymaga konsekwentnego modelu danych i dobrej integracji sieciowej |
Warto zapamiętać jeszcze jedną rzecz: CANopen i J1939 nie są „wariantami kabla”, tylko sposobami organizacji komunikacji nad CAN. CAN in Automation zwraca uwagę, że CANopen jest szeroko stosowany w automatyce i urządzeniach wbudowanych, a J1939 stał się standardem w wielu maszynach ciężkich i terenowych. To właśnie te warstwy wyższe sprawiają, że jedna technologia bazowa może działać w tak różnych branżach.
Gdy różnica między warstwą bazową a profilem aplikacyjnym jest już jasna, naturalnie pojawia się pytanie: gdzie ta technologia faktycznie pracuje na co dzień.
Gdzie CAN naprawdę pracuje na co dzień
W samochodzie CAN najczęściej obsługuje komunikację między sterownikami odpowiedzialnymi za napęd, komfort, nadwozie, klimatyzację, diagnostykę i bramki sieciowe. Nie wszystkie dane muszą iść przez jedną magistralę, dlatego w nowoczesnych autach często spotyka się kilka segmentów CAN o różnych priorytetach i parametrach. To praktyczny sposób na oddzielenie ruchu krytycznego od mniej pilnego.
W przemyśle CAN szczególnie dobrze czuje się w maszynach, które pracują w ruchu i w trudnych warunkach: wózkach widłowych, podnośnikach, maszynach budowlanych, rolniczych, pojazdach specjalnych, napędach i modułach I/O. To nie jest przypadek. Tam liczy się odporność na zakłócenia, rozsądny koszt okablowania i możliwość rozproszenia inteligencji po wielu węzłach. W takich systemach CAN często jest szkieletem komunikacyjnym, a nie dodatkiem.
Praktyczny przykład: w pojeździe terenowym jeden segment może obsługiwać sterowanie silnikiem i skrzynią, a inny odpowiadać za osprzęt, czujniki i elementy robocze. W maszynie produkcyjnej podobny podział pozwala rozdzielić napędy, interfejs operatorski i czujniki bezpieczeństwa. Im lepiej to rozdzielenie jest zaplanowane, tym mniej późniejszych problemów z priorytetami i zakłóceniami.
Skoro wiadomo już, gdzie CAN się sprawdza, czas przejść do tego, jak szybko wychwycić problem, zanim zacznie on blokować cały system.
Jak diagnozować sieć bez zgadywania
Najczęstszy błąd w diagnozie CAN polega na tym, że ktoś od razu podejrzewa oprogramowanie, a pomija warstwę fizyczną. Ja zwykle zaczynam od najprostszych rzeczy: terminacja, przewody, masa, prędkość sieci i zgodność transceiverów. W wielu przypadkach to właśnie tam ukrywa się źródło problemu.
| Objaw | Najbardziej prawdopodobna przyczyna | Co sprawdzić w pierwszej kolejności |
|---|---|---|
| Brak komunikacji w całej sieci | Brak terminacji, przerwa w przewodzie, zła prędkość bitowa | Pomiar rezystancji, ciągłość linii, ustawienia wszystkich węzłów |
| Losowe błędy i sporadyczne utraty ramek | Za długie odgałęzienia, zakłócenia, słabe połączenie masy | Oscyloskop, długość stubów, jakość złącz |
| Jeden węzeł przechodzi w bus-off | Zbyt dużo błędów transmisji, uszkodzony transceiver lub źle dobrana sieć | Licznik błędów, stan kontrolera, test podmiany modułu |
| Działa tylko część urządzeń | Filtrowanie identyfikatorów, błędna konfiguracja aplikacji lub gateway | Mapowanie ID, routing, logika odbioru ramek |
W praktyce bardzo pomaga analizator CAN albo oscyloskop. Analizator pokaże ramki, błędy i kolejność zdarzeń, a oscyloskop ujawni odbicia, zbyt ostre zbocza albo problem z terminacją. Jeśli sieć działa na stole, ale sypie się w pojeździe, zwykle chodzi o wiązkę, masę albo środowisko zakłóceniowe, a nie o sam protokół.
Jest jeszcze jeden prosty test, który często oszczędza czas: przy wyłączonym zasilaniu zmierz rezystancję między CAN_H i CAN_L. Jeśli zamiast około 60 Ω widzisz wynik wyraźnie odbiegający od normy, zaczynam szukać problemu w terminacji, przerwaniu linii albo nieprawidłowo podłączonym odgałęzieniu. Gdy warstwa fizyczna jest pod kontrolą, można już sensownie ocenić, czy CAN jest właściwym wyborem dla danego projektu.
Kiedy CAN jest dobrym wyborem, a kiedy lepiej sięgnąć po coś innego
CAN wybieram wtedy, gdy potrzebuję niezawodnej komunikacji sterującej, wielu węzłów i rozsądnego kosztu wdrożenia. To bardzo dobry kompromis dla systemów, które nie muszą przesyłać ogromnych ilości danych, ale muszą reagować przewidywalnie. W projektach, w których rośnie liczba sygnałów albo pojawia się większy ładunek danych diagnostycznych, CAN FD daje dodatkowy oddech.
| Technologia | Kiedy ma sens | Czego nie robi najlepiej |
|---|---|---|
| CAN | Deterministyczne sterowanie, odporność, niewielkie i średnie porcje danych | Duże transfery, multimedia, rozbudowana telemetria |
| LIN | Tanie i proste urządzenia pomocnicze, niska złożoność | Wydajność, wielowęzłowość i bardziej wymagająca diagnostyka |
| Ethernet | Wysoka przepustowość, kamery, logi, aktualizacje, bogata diagnostyka | Prostota okablowania i niski koszt w małych układach sterujących |
W nowych architekturach nie chodzi więc o to, by CAN „wygrał ze wszystkim”. Chodzi o to, by dobrać go do zadania. Jeśli system ma sterować, a nie przesyłać strumienie danych, CAN wciąż jest bardzo rozsądnym wyborem. Jeśli ma obsługiwać kamery, masową diagnostykę albo aktualizacje OTA, lepiej od razu zaplanować obok niego Ethernet albo przynajmniej bramkę między sieciami.
Warto też pamiętać o bezpieczeństwie. Sama magistrala nie rozwiązuje problemu uwierzytelniania ramek ani ochrony przed nieautoryzowaną ingerencją, więc w projektach z wyższym ryzykiem trzeba dołożyć zabezpieczenia na poziomie bramek, oprogramowania lub wyższych protokołów. To właśnie taki pragmatyczny moment decyduje, czy system później da się utrzymać i rozwijać bez nerwowych poprawek.
Gdy patrzę na CAN z perspektywy projektu, najważniejsze są trzy rzeczy: sensowny podział priorytetów, poprawna terminacja i jasna definicja sygnałów. Jeśli te elementy są dobrze ustawione, sieć zwykle odwdzięcza się stabilnością przez lata.
Co warto zapamiętać przy projektowaniu lub ocenie systemu CAN
Najlepsze wdrożenia CAN nie wygrywają „magią protokołu”, tylko porządkiem w architekturze. Jeśli projektujesz nową sieć albo oceniasz gotowy system, zacznij od listy sygnałów, priorytetów ramek i topologii okablowania. To daje więcej niż późniejsze, chaotyczne strojenie parametrów.
- Najpierw zaplanuj fizykę - terminację, długość przewodów, odgałęzienia i jakość masy.
- Potem uporządkuj identyfikatory - krytyczne dane powinny mieć wyższy priorytet, a ruch mniej ważny nie może blokować sieci.
- Nie przeceniaj samego protokołu - stabilność zależy także od transceiverów, layoutu PCB, złączy i montażu.
- Gdy danych robi się więcej, rozważ CAN FD - zmniejsza liczbę ramek i lepiej skaluje sieć.
- Jeśli system rośnie dalej, przewiduj bramkę do Ethernetu - to prostsze niż późniejsze przepisywanie całej architektury.
CAN wciąż ma bardzo mocną pozycję, bo dobrze równoważy koszt, niezawodność i prostotę integracji. Właśnie dlatego nie traktuję go jako „starej technologii”, tylko jako narzędzie, które nadal świetnie robi swoją robotę tam, gdzie wymagana jest przewidywalna komunikacja między sterownikami. Jeśli dobrze ustawisz warstwę fizyczną i sensownie rozplanujesz ruch, ta magistrala odwdzięczy się stabilnością, którą łatwo docenić dopiero wtedy, gdy system działa w realnych warunkach, a nie tylko na schemacie.